
El reto: un robot bípedo funcional impreso en 3D
En 3Dfils nos apasionan los proyectos en los que el filamento deja de ser una bobina y se convierte en un producto que funciona. Este es uno de esos casos. Un maker,Miguel Torres Gordo, se propuso un reto clásico del mundo de la robótica DIY: diseñar, imprimir y programar desde cero un robot bípedo capaz de mantener el equilibrio, andar y detectar obstáculos. Todo el chasis, las piernas, los soportes electrónicos y las levas se fabricaron con nuestro esFil PLA Max Negro , impreso en FDM con una ANYCUBIC Mega S.
La parte interesante para nosotros como fabricantes no es solo el resultado final, sino lo que el proyecto exige del filamento: tolerancias estrechas en encajes de servomotores, piezas con ejes pasantes, soportes que tienen que aguantar tensiones reales en cada paso y un acabado lo suficientemente bueno para que la mecánica trabaje sin fricciones inesperadas.
Ficha técnica del proyecto (la tabla)
| Producto utilizado | esFil PLA MAX negro – 3Dfils |
| Aplicación | Estructura completa de robot bípedo (chasis, piernas, soportes) |
| Técnica de impresión | FDM |
| Impresora | ANYCUBIC Mega S |
| Temperatura de extrusión | 210 ºC (215 ºC primera capa) |
| Temperatura de cama | 60 ºC |
| Altura de capa | 0,2 mm |
| Grosor de pared | 1,2 mm |
| Nº de piezas estructurales impresas | 16+ piezas funcionales |
¿Quieres replicar este robot? Descarga la guía completa
Descarga aqui el PDF con los parámetros de impresión, lista de componentes y guía paso a paso.
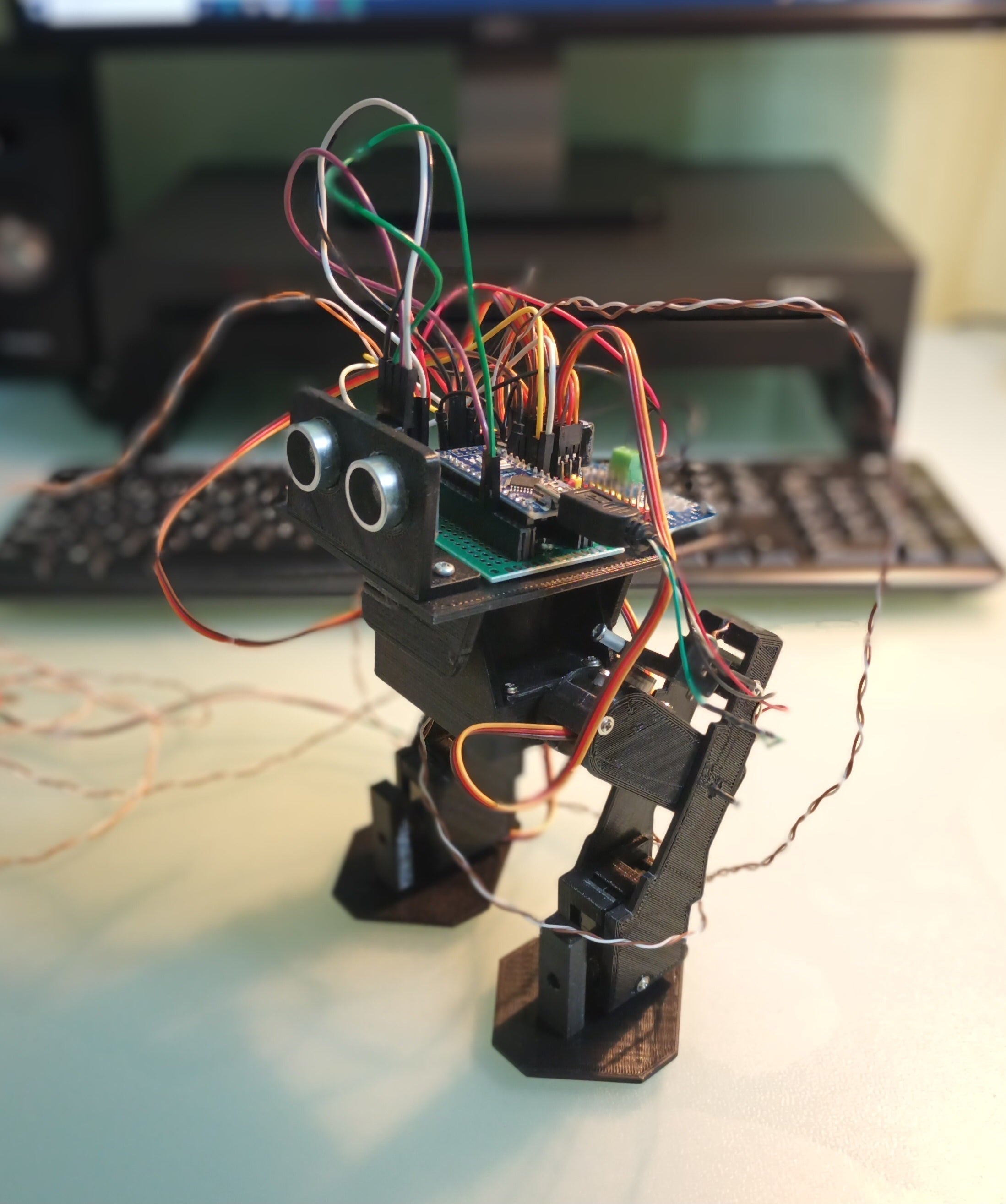
Electrónica y diseño: Arduino Nano, 7 servos MG90S y sensor HC-SR04
El robot es un bípedo no humanoide con cuatro puntos de movimiento por pierna, accionados por siete servomotores MG90S controlados desde un Arduino Nano a través de un módulo PCA9685, y un sensor de ultrasonidos HC-SR04 para detectar obstáculos. La estructura se diseñó íntegramente en FreeCAD y se dividió en piezas modulares: caja de servos, plataforma superior, soporte del sensor, muslos, pantorrillas, pies y las levas que transmiten el movimiento.
Cada pieza estaba pensada para encastrar componentes electrónicos reales —no maquetas— con sus tolerancias. Eso convierte la impresión en algo más que estética: si el filamento contrae de más, los servos no entran; si la pared cede, las articulaciones bailan.

Por qué esFil PLA MAX es el filamento ideal para piezas mecánicas con servomotores
El esFil PLA MAX es un PLA pensado para piezas funcionales: más rigidez y resistencia al impacto que un PLA estándar, sin renunciar a la facilidad de impresión del PLA tradicional. En un proyecto como este, donde la pieza es a la vez estructura, soporte mecánico y carcasa, esa combinación marca la diferencia. Estos son los puntos donde el material demostró su valor:
• Rigidez sin fragilidad: las piernas soportan el peso del robot y la torsión de los servos sin deformarse capa a capa, y los pies aguantan los micro-impactos de cada paso sin astillar.
• Precisión dimensional: los alojamientos para los servomotores MG90S quedaron a la primera, sin lijar ni rebajar. Es lo que esperas cuando diseñas con tolerancias de décimas.
• Acabado uniforme: el negro de esFil PLA MAX rinde de forma muy homogénea entre piezas impresas en momentos distintos, algo que se aprecia cuando montas un conjunto visible.
• Buen comportamiento térmico durante la impresión: a 210 ºC de extrusión y 60 ºC de cama no hubo warping ni problemas de adherencia, incluso en piezas grandes como la plataforma superior.
• Capa a capa fiable: con altura de 0,2 mm y 1,2 mm de pared, las piezas resultaron rígidas pero ligeras, exactamente el equilibrio que un bípedo necesita para no malgastar par en cada paso.
Parámetros de impresión para PLA MAX en ANYCUBIC Mega
Para quien quiera replicarlo, estos fueron los parámetros principales con los que se imprimieron las piezas en una ANYCUBIC Mega S y esFil PLA MAX negro. Son una buena base, pero cada combinación impresora / boquilla / firmware pide su pequeño ajuste:
• Temperatura de extrusión: 210 ºC
• Temperatura primera capa: 215 ºC
• Temperatura de cama: 60 ºC
• Altura de capa: 0,2 mm (también en la capa inicial)
• Grosor de pared: 1,2 mm
• Refrigeración primera capa: desactivada para mejorar la adhesión

Resultado: un bípedo que camina y esquiva obstáculos
Tras el ensamblaje y el ajuste de los siete servomotores a 90º como posición de referencia, el robot ejecuta dos rutinas principales: una postura de "preparado para andar" y una rutina de marcha que coordina los servos para desplazar el peso, liberar la pierna libre y avanzar. El sensor HC-SR04 evalúa la distancia a obstáculos y, si hay algo a menos de 30 cm, el robot se queda en posición de espera en lugar de seguir caminando.
La estructura impresa cumple con los tres requisitos que esperábamos del material: aguanta los esfuerzos cíclicos del andar, mantiene la geometría de los encajes y proporciona un acabado profesional al producto terminado.

Más allá del proyecto:
En 3Dfils llevamos años trabajando para que el filamento no sea el cuello de botella de tus ideas. Este robot es un buen recordatorio de hasta dónde puede llegar un PLA bien formulado cuando el diseño, la impresora y el material van en la misma dirección.
¿Quieres imprimir tu próximo proyecto con esFil PLA MAX?
Descubre toda la gama de esFil PLA MAX y otros filamentos técnicos fabricados en España por 3Dfils. Si tienes un proyecto entre manos y quieres que lo destaquemos en nuestro blog, escríbenos: nos encanta enseñar lo que la comunidad maker hace con nuestros materiales.





Compartor:
Cómo imprimir filamento TPU en tu Creality K1, K1 MAX, K1C, K1SE y K2: Guía completa y perfil