
The challenge: a functional 3D-printed bipedal robot
At 3Dfils, we are passionate about projects where filament stops being a spool and becomes a functional product. This is one of those cases. A maker, Miguel Torres Gordo, set himself a classic challenge in the world of DIY robotics: to design, print, and program from scratch a bipedal robot capable of maintaining balance, walking, and detecting obstacles. The entire chassis, legs, electronic supports, and cams were made with our esFil PLA Max Black, FDM printed with an ANYCUBIC Mega S.
The interesting part for us as manufacturers is not just the final result, but what the project demands from the filament: tight tolerances in servo motor fittings, parts with through-shafts, supports that have to withstand real stress with each step, and a finish good enough for the mechanics to work without unexpected friction.
Project technical sheet (the table)
| Product used | esFil PLA MAX black – 3Dfils |
| Application | Complete bipedal robot structure (chassis, legs, supports) |
| Printing technique | FDM |
| Printer | ANYCUBIC Mega S |
| Extrusion temperature | 210 ºC (215 ºC first layer) |
| Bed temperature | 60 ºC |
| Layer height | 0.2 mm |
| Wall thickness | 1.2 mm |
| Number of structural parts printed | 16+ functional parts |
Want to replicate this robot? Download the complete guide
Download the PDF with printing parameters, component list, and step-by-step guide here.
Electronics and design: Arduino Nano, 7 MG90S servos, and HC-SR04 sensor
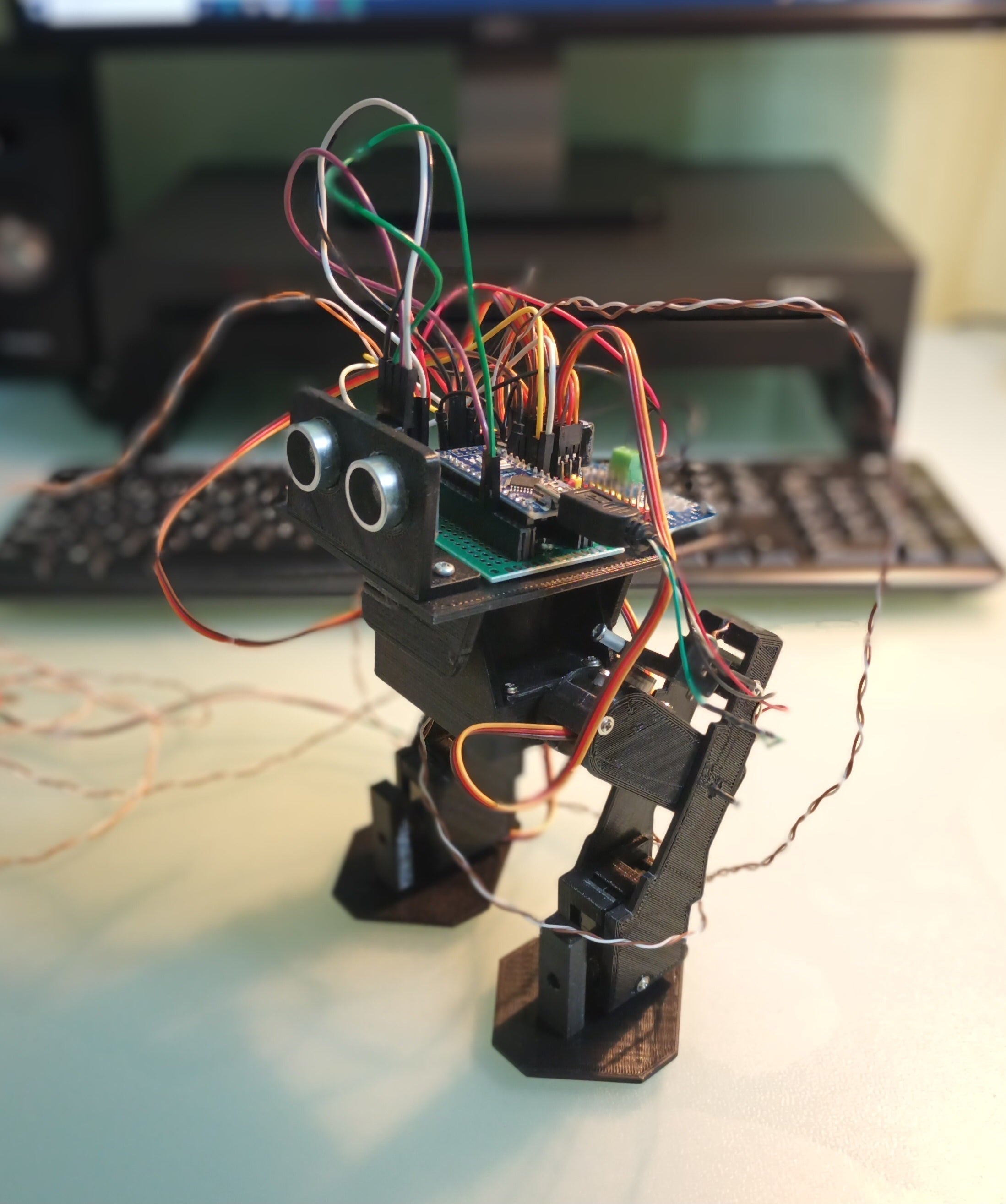
The robot is a non-humanoid biped with four points of movement per leg, driven by seven MG90S servo motors controlled by an Arduino Nano via a PCA9685 module, and an HC-SR04 ultrasonic sensor for obstacle detection. The structure was entirely designed in FreeCAD and divided into modular parts: servo box, upper platform, sensor support, thighs, calves, feet, and the cams that transmit movement.
Each piece was designed to house real electronic components—not mock-ups—with their tolerances. This makes printing more than just aesthetics: if the filament shrinks too much, the servos won't fit; if the wall gives way, the joints will wobble.

Why esFil PLA MAX is the ideal filament for mechanical parts with servo motors
esFil PLA MAX is a PLA designed for functional parts: greater rigidity and impact resistance than standard PLA, without sacrificing the ease of printing of traditional PLA. In a project like this, where the part is simultaneously structure, mechanical support, and casing, this combination makes all the difference. These are the points where the material proved its worth:
• Rigidity without brittleness: the legs support the robot's weight and the servos' torsion without deforming layer by layer, and the feet withstand the micro-impacts of each step without splintering.
• Dimensional precision: the housings for the MG90S servo motors fit perfectly the first time, without sanding or filing. This is what you expect when designing with tenth-of-a-millimeter tolerances.
• Uniform finish: esFil PLA MAX black performs very homogeneously between parts printed at different times, which is appreciated when assembling a visible set.
• Good thermal behavior during printing: at 210 ºC extrusion and 60 ºC bed temperature, there was no warping or adhesion problems, even on large parts like the upper platform.
• Reliable layer-by-layer: with a layer height of 0.2 mm and a wall thickness of 1.2 mm, the parts were rigid but light, exactly the balance a biped needs to avoid wasting torque with each step.
Printing parameters for PLA MAX on ANYCUBIC Mega
For those who want to replicate it, these were the main parameters used to print the parts on an ANYCUBIC Mega S with esFil PLA MAX black. They are a good starting point, but each printer/nozzle/firmware combination requires its own small adjustments:
• Extrusion temperature: 210 ºC
• First layer temperature: 215 ºC
• Bed temperature: 60 ºC
• Layer height: 0.2 mm (also for the initial layer)
• Wall thickness: 1.2 mm
• First layer cooling: disabled to improve adhesion

Result: a biped that walks and dodges obstacles
After assembly and adjusting the seven servo motors to 90º as a reference position, the robot executes two main routines: a "ready to walk" posture and a walking routine that coordinates the servos to shift weight, free the free leg, and move forward. The HC-SR04 sensor evaluates the distance to obstacles, and if something is less than 30 cm away, the robot remains in a standby position instead of continuing to walk.
The printed structure meets the three requirements we expected from the material: it withstands the cyclic stresses of walking, maintains the geometry of the fittings, and provides a professional finish to the completed product.

Beyond the project:
At 3Dfils, we have been working for years to ensure that filament is not the bottleneck for your ideas. This robot is a good reminder of how far a well-formulated PLA can go when design, printer, and material all work in the same direction.
Do you want to print your next project with esFil PLA MAX?
Discover the full range of esFil PLA MAX and other technical filaments manufactured in Spain by 3Dfils. If you have a project in hand and want us to feature it on our blog, write to us: we love to show what the maker community does with our materials.





Sharer:
How to print TPU filament on your Creality K1, K1 MAX, K1C, K1SE, and K2: Complete guide and profile